Research
Brief introduction
The Terutsuki Laboratory, also known as the Bio-Hybrid Robotics Laboratory, is actively engaged in research and development to bring about a world where the odor information in the environment becomes accessible, manageable, and applicable for both humans and machines.Insects, despite their diminutive size, excel at avoiding danger and navigating toward food sources or potential mates by relying on their sense of smell. In contrast, our own sense of smell is limited. By leveraging the superior olfactory system of insects, we aim to expand our understanding of the world—specifically, the spatial dimension where odor information exists. The integration of biomaterials (such as tissues and cells) with artificial components in the emerging field of bio-hybrid devices and robotics holds the promise of addressing challenges that conventional engineering technologies struggle to overcome.
Our laboratory is dedicated to researching and applying novel odor sensors and odor-detecting robots based on bio-hybrid systems. Additionally, we are committed to advancing our comprehension of living systems.
Videos of bio-hybrid odor-detecting drone
Following the publication of our main paper (Terutsuki et al., Sens. Actuators B Chem. 2021), we have shared a video featuring a bio-hybrid odor-detecting drone related to a journal publication (Terutsuki et al., J. Vis. Exp. 2021) in JoVE. The video and methods are readily accessible.
Following the publication of our main paper (Terutsuki et al., Sens. Actuators B Chem. 2021), we have shared a video featuring a bio-hybrid odor-detecting drone related to a journal publication (Terutsuki et al., J. Vis. Exp. 2021) in JoVE. The video and methods are readily accessible.
Development of odor-detecting flying robot (bio-hybrid drone) and odor source localization
While dogs are renowned for their exceptional sense of smell, insects exhibit similarly remarkable olfactory capabilities. For instance, a male silkworm moth, upon detecting a female sex pheromone (bombykol) with its antenna, exhibits precise odor-source searching behavior (surge, zigzag, and turning) to locate a mate. The application of these exceptional insect abilities in engineering holds vast potential, spanning from inspecting critical infrastructure (e.g., gas leak detection) to disaster response, human life search, and hazardous material detection.Insect antennae, when severed from the head and connected to electrodes, function as odor sensor elements through a technique known as electroantennogram (EAG). Our developed EAG sensor, a compact odor sensor based on electroantennography, is mounted on a small drone. This innovation results in an odor-detecting flying robot (bio-hybrid drone) utilizing live silkworm moth antennae. By integrating the EAG sensor into a carbon tube enclosure, the drone accurately assesses odor concentration and direction by introducing anisotropy to the response value. Consequently, the drone successfully locates the odor source using a spiral-surge algorithm, continuously assessing odor concentration (bombykol) while rotating and proceeding straight toward the direction of maximum response value. This achievement marks the world's first instance of a bio-hybrid drone localizing an odor source by considering both odor concentration and direction. Ongoing research and development will further enhance the performance of the sensor and drone, with the aim of practical application in real-world scenarios.
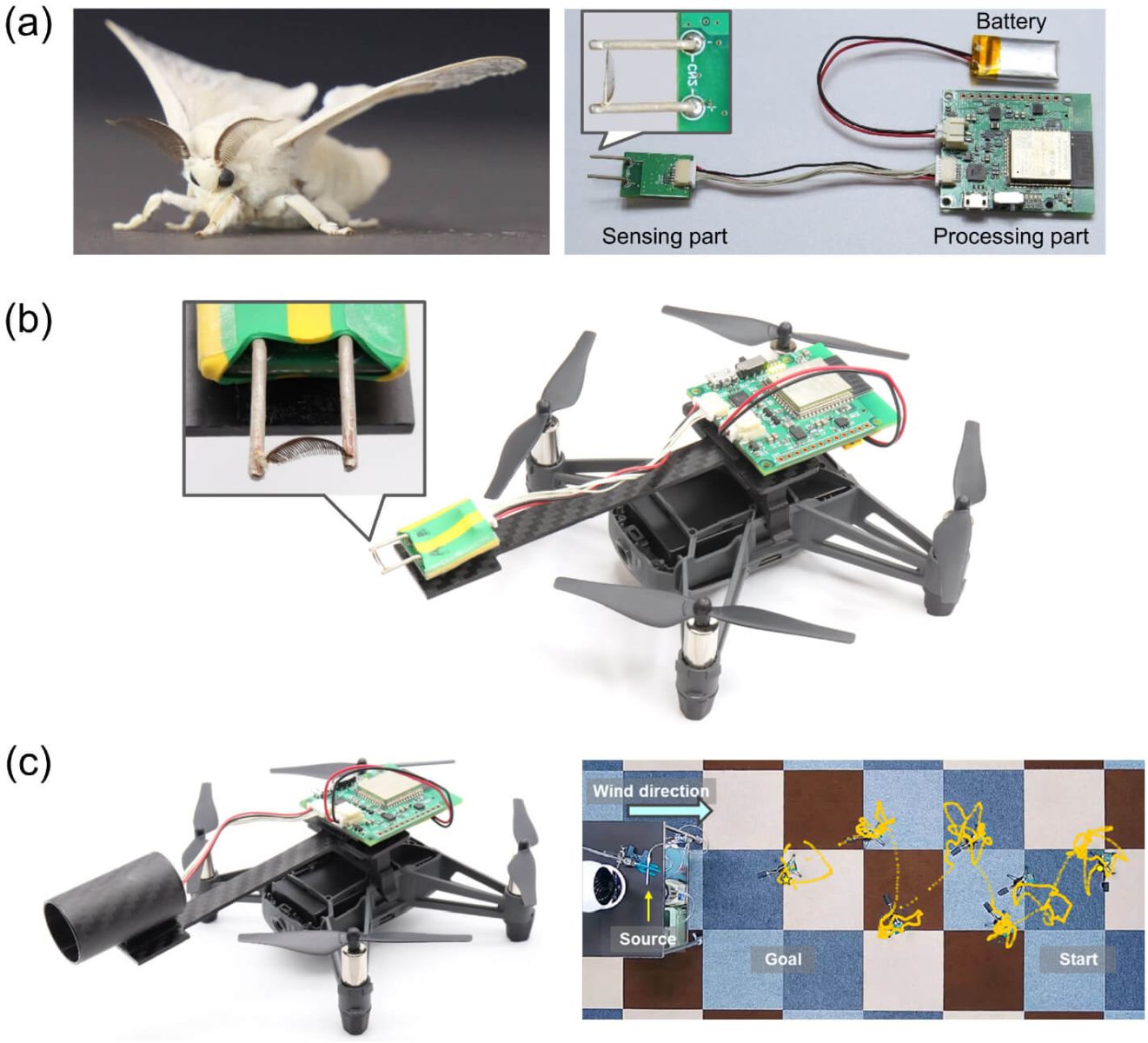
Figure (a) Pictures of a male silkworm moth (Bombyx mori) and the developed EAG sensor. (b) Picture of the bio-hybrid drone with a silkworm moth antenna. (c) Picture of the bio-hybrid drone with the sensor enclosure and a typical flight trajectory toward the odor source using the spiral-surge algorithm.
Other research topics
In addition to odor-detecting flying robots, we are exploring additional research topics. Please contact us for more information.References
[1] Terutsuki et al., Sens. Actuators B Chem. 339(2021) 129770.
[2] Terutsuki et al., J. Vis. Exp. 174 (2021) e62895.